บทความนี้ สอน พื้นฐานความรู้ เกี่ยวกับ มาตรฐานการสื่อสาร แบบ ลินบัส (LIN Bus) มีการอธิบายเกี่ยวกับ วิธีการเชื่อมต่อ ความเร็ว ฯลฯ
หากผู้อ่านมีข้อสงสัยเพิ่มเติม กรุณา ติดต่อ ทีมงาน เทคสแควร์
จุดเริ่มต้นของการสื่อสารแบบ LIN
มาตรฐานการสื่อสารแบบ LIN เป็นการสื่อสารแบบดิจิทัล ถูกพัฒนาขึ้นโดยกลุ่ม LIN Consortium ซึ่งประกอบไปด้วยบริษัทผู้ผลิตรถยนต์ชั้นนำในกลุ่มยุโรป เป็นคำย่อมาจาก Local Interconnect Network เพื่อใช้ในการสื่อสารภายในยานพาหนะ เพื่อช่วยเสริมการทำงานของการรับส่งข้อมูลแบบแคนบัส ทำหน้าที่เป็นเครือข่ายย่อย ของ เครือข่ายหลักที่มีการสื่อสารแบบแคนบัส โดยการลดความเร็วในการสื่อสาร และทำให้มีราคาถูกลง ทำให้ได้รับความนิยมมากขึ้นในกลุ่มอุตสาหกรรมยานยนต์ เช่น ระบบควบคุมกระจกไฟฟ้า ระบบปรับอากาศ การควบคุมเบาะไฟฟ้า พวงมาลัยอัจริยะ ฯลฯ
การเชื่อมต่อการสื่อสารแบบ LIN
มาตรฐานการสื่อสารแบบ LIN มีการกำหนดว่า สามารถมีอุปกรณ์ที่เป็น LIN Master ได้ จำนวน 1 ตัว และมีอุปกรณ์ที่เป็น LIN Slave ได้มากที่สุด จำนวน 16 ตัว โดยอุปกรณ์ที่เป็น LIN Master สามารถเชื่อมต่อกับเครือข่ายแคนบัสได้เป็นต้น
ผู้ใช้สามารถใช้สายไฟ 2 สาย แบบธรรมดาในการเชื่อมต่ออุปกรณ์สื่อสารในเครือข่าย LIN ได้ โดยสายหนึ่งจะเป็นสายสัญญาณ LIN (ระดับแรงดัน 12V) และอีกสายหนึ่งจะเป็นสายกราวด์ เรียกว่า LIN-GND ส่วนขา VBAT จะเป็นส่วนของไฟเลี้ยง ซึ่งส่วนใหญ่แล้วจะใช้ไฟเลี้ยง 12 VDC หรือในย่าน 8 – 18 VDC ได้ มาตรฐานการสื่อสารแบบ LIN มีจุดเด่นตรงที่เป็นการเชื่อมต่อแบบ Synchronization ระหว่างอุปกรณ์ที่เป็น LIN Slave ในเครือข่ายได้ โดยผู้ใช้สามารถเชื่อมต่ออุปกรณ์ของ Ixxat ได้โดยไม่ต้องต่อตัวต้านทาน 1 กิโลโอห์ม เนื่องจากมีการออกแบบ Pull-Up Resistor ไว้ภายในให้แล้ว สำหรับการใช้งานในรูปแบบ LIN Master และจะถูกตัดการทำงานโดยอัตโนมัติ เมื่อนำไปใช้งานในรูปแบบ LIN Slave เพื่อความสะดวกในการใช้งาน
รูปแบบเครือข่ายการสื่อสารแบบ LIN ที่ได้รับความนิยมมากที่สุดแบบหนึ่ง เป็นการเชื่อมต่อสายสัญญาณหลักเป็นเส้นขนาน จากนั้นจึงเชื่อมต่ออุปกรณ์ที่ต้องการจากสายสัญญาณหลัก และใช้ ตัวต้านทาน ขนาด 120 โอห์ม ปิดที่จุดเริ่มต้นและปลายของเครือข่าย เพื่อไม่ให้เกิดการสะท้อนกลับของสัญญาณทางไฟฟ้า ผู้ใช้สามารถเลือกอุปกรณ์ของ Ixxat บางรุ่น ที่มีตัวต้านทานอยู่ภายใน เพื่อความสะดวก และความเรียบร้อยในการเชื่อมต่อสายสัญญาณได้
รูปแบบ และความเร็วของการสื่อสารแบบ LIN
มาตรฐานการสื่อสารแบบ LIN มีการใช้หลักการที่เรียกว่า sync break ในการเริ่มต้นการสื่อสาร โดยการส่งข้อความที่มีขนาด 13 บิตโดยอุปกรณ์ที่เป็น LIN Master หลังจากนั้นจะมีการส่งสัญญาณ sync field ซึ่งมีลักษณะเป็น 1-0 สลับกัน เพื่อทำสร้าง clock synchronization ให้กับอุปกรณ์ LIN Slave
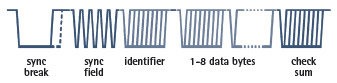
หลังจากนั้นจะเป็น identifier แบบเดียวกับมาตรฐานการสื่อสารแบบแคนบัส แต่จะมีขนาดเพียง 6 บิต แล้วจึงตามด้วยข้อความ และปิดท้ายด้วยการตรวจสอบแบบ checksum โดยมีความเร็วสูงสุดที่ 20 kbps
ตารางเปรียบเทียบระหว่าง การสื่อสารแบบ LIN กับการสื่อสารแบบ CAN
| LIN Bus | CAN Bus | |
| ราคา | ถูก | ปานกลาง |
| การทำงานพร้อมกัน | สามารถทำได้ | ไม่สามารถทำได้ |
| จำนวนบิตของ Identifier | 6 บิต | 11 หรือ 29 บิต |
| ความเร็วสูงสุด | 20 kbps | 1 Mbps |
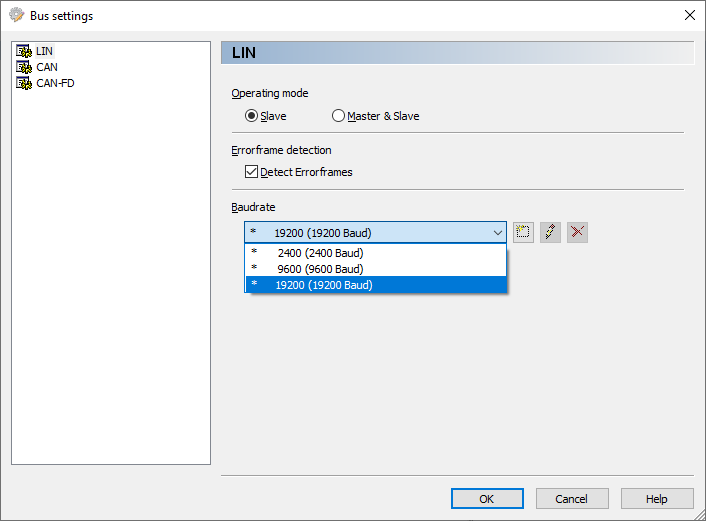
ยกตัวอย่าง เช่น อุปกรณ์แปลงสัญญาณจาก USB เป็น LIN รุ่น USB-to-CAN V2 Automotive สามารถรองรับการเชื่อมต่อเครือข่าย LIN Bus ได้จำนวน 1 ช่อง และสามารถรองรับการกำหนดค่าความเร็วของเครือข่าย ได้ตั้งแต่ 2400, 9600 และ 19200 bpsได้เพื่อความสะดวกในการใช้งาน ตามรูปด้านล่าง