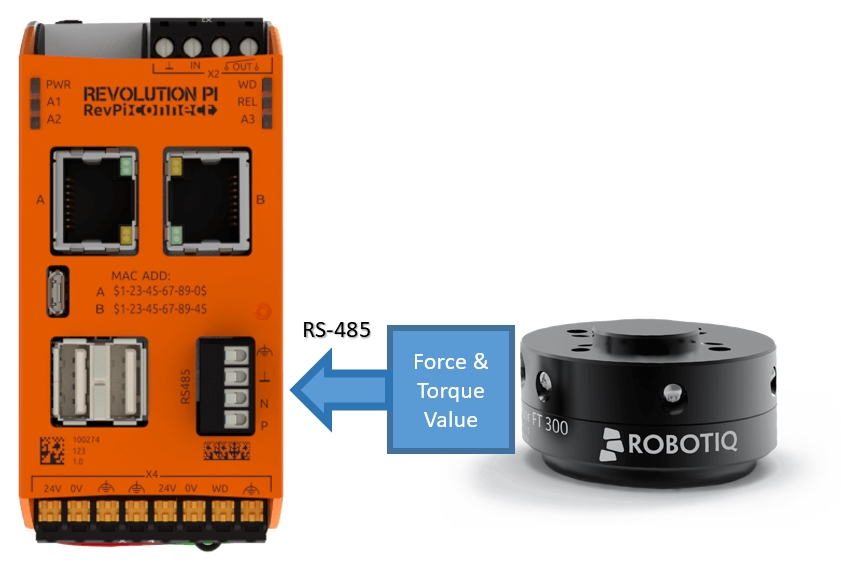
บทความฉบับนี้สอนการเชื่อมต่อ KUNBUS RevPi Controller เช่น RevPi Core 3 หรือ RevPi Connect เข้ากับเซ็นเซอร์ วัดแรง และแรงบิด Robotiq FT 300 Force Torque Sensor
อุปกรณ์ Revolution Pi เช่น RevPi Core 3 และ RevPi Connect ถูกพัฒนาขึ้น เพื่อทดแทน Raspberry Pi (RPi) สำหรับ งานอุตสาหกรรม
หากผู้อ่านมีข้อสงสัยเพิ่มเติม กรุณา ติดต่อ ทีมงาน เทคสแควร์
การกำหนดค่าเริ่มต้น
- ทำการ เชื่อมต่อ อุปกรณ์ ทั้งหมด ตามบทความ การใช้งาน RevPi ผ่านโปรโตคอล SSH แบบรีโมท
- ทำการ กำหนดค่า RevPi Connect ให้สามารถ เริ่มต้น การทำงานด้วย GUI Mode ได้ ตามบทความ สอนการกำหนดค่าอุปกรณ์ RevPi Core / RevPi Core 3 ให้เริ่มต้นการทำงานด้วย GUI Mode
- ทำการ กำหนดค่า RevPi Connect ให้สามารถ ใช้งาน Remote Desktop ได้ ตามบทความ สอนการใช้ Remote Desktop กับ RevPi Core / RevPi Core 3
อุปกรณ์ประกอบ
- คอมพิวเตอร์ จำนวน 1 เครื่อง
- อุปกรณ์ RevPi Connect จำนวน 1 ตัว
- อุปกรณ์ Robotiq FT 300 จำนวน 1 ตัว
- แหล่งจ่ายไฟ 24V DC จำนวน 2 ชุด
ขั้นตอนการเชื่อมต่อสัญญาณ
1) เซ็นเซอร์ วัดแรง และแรงบิด Robotiq FT 300 Force Torque Sensor สามารถวัดแรงได้ 3 แกน (Fx, Fy, Fz) ในย่าน +/- 300 N และวัดแรงบิดได้ 3 แกน (Mx,My,Mz) ในย่าน +/- 30 N-m และสามารถทำการส่งค่าที่วัดได้ ออกมาทาง MODBUS RTU หรือ RS-485
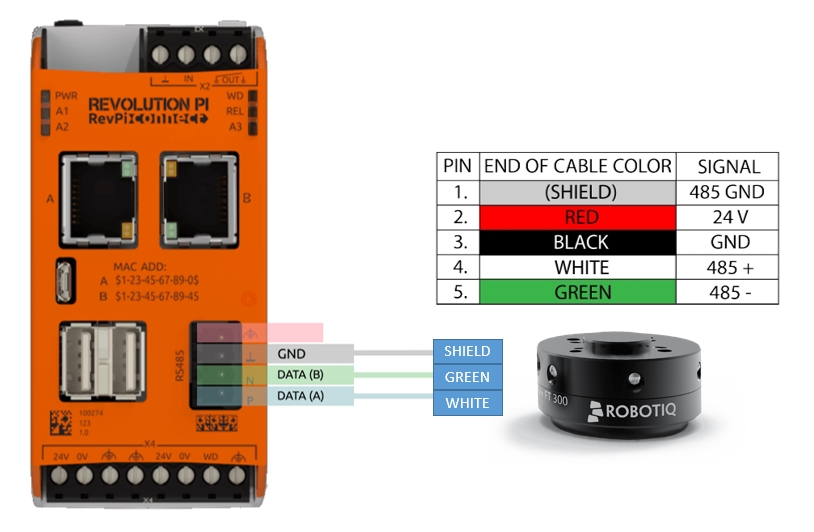
หลังจากทำการจ่ายไฟเลี้ยงให้อุปกรณ์ทั้ง 2 ตัว แล้ว ให้ทำการต่อสายตาม Diagram ด้านล่าง
2) ดาวน์โหลดไดร์เวอร์ Sensor Development Package จากเว็บไซต์ของ Robotiq ซึ่งในตัวอย่างนี้จะเป็นไฟล์ชื่อ FT-300_dev_package_SDP-1.0.1_20180328.rar ให้ทำการ แตกไฟล์ออกมา และเข้าไปที่โฟลเดอร์ driver ของ RevPi Connect และพิมพ์คำสั่งตามรายการด้านล่างเพื่อคอมไพล์โปรแกรม
- make linux
ทดสอบการใช้งานพอร์ต RS-485 บน RevPi Connect โดยการใช้คำสั่งด้านล่าง
- ls -l /dev | grep ttyUSB
ถ้าสามารถใช้งานได้ถูกต้อง ระบบจะต้องตอบกลับมาเป็น ttyUSB0
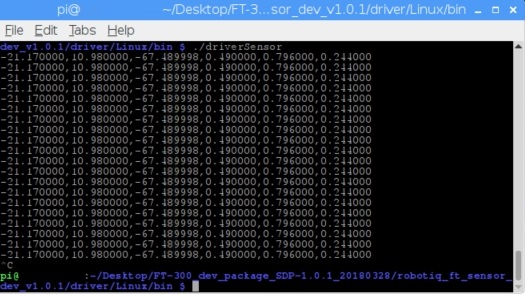
3) ให้พิมพ์คำสั่งด้านล่าง เพื่อ ทดสอบ การอ่านค่าจาก FT 300 ทั้งหมด 6 ค่า ได้แก่ Fx, Fy, Fz, Mx, My, Mz ตามรูปด้านล่าง โดยที่ผู้ใช้สามารถกดปุ่ม Ctrl+C เพื่อทำการออกจากการทดสอบ
ทั้งนี้ยังสามารถเชื่อมต่อ เซ็นเซอร์ FT 300 ได้พร้อมกันมากกว่า 1 ตัวโดยอ้างอิงจาก Diagram ด้านล่าง
